
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}

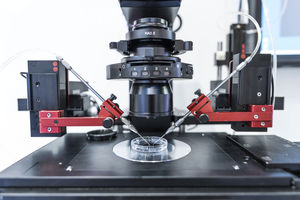
电动显微操纵器与显微镜配合使用,可以完成人手不能从事的精细运动的显微操作。MM-500电动显微操纵器设计精密,可用于电生理实验中操纵记录电极、刺激电极的移动,适合膜片钳实验、细胞外记录、细胞内记录、微量注射和精密机械定位等场景。 重复定位精度高,增加结果的稳定性 多种模式可供选择,灵活组合搭配 触摸屏界面智能灵敏,操作简便 膜片钳电生理实验 膜片钳实验通过记录离子通道的离子电流来反映细 胞膜离子通道活动情况。显徹操纵器平稳移动徹电 极,接触细胞膜及长时间记录,对于完成实验十分 ...

... 电动微机械手主要用于电生理实验中操作记录电极和刺激电极运动。MM-500 专为满足科学界的各种需求而设计,适用于膜片钳实验、显微注射、细胞外记录、细胞内记录和精确机器人定位应用。 特点 - 体积小、重量轻,人性化的双语操作界面,灵活的程序调试。 - TFT 屏幕可显示激活机械手的位置和移动速度,以及 X、Y 和 Z。 - 高分辨率步进电机满足四轴驱动,X、Y、Z 和对角线移动的最大距离为 25mm,稳定性好,漂移小。 - 原点功能可满足电极快速返回原点的要求,重复定位精度高。 - ...


... ACCU-Beam® MicroSpot Micromanipulator是耳鼻喉科和神经外科需要最小治疗CO₂激光光斑尺寸的最佳解决方案。有多种支架可供选择,与大多数激光器、显微镜和阴道镜兼容。 -光斑尺寸低至125微米 -用于可变光斑尺寸的缩放组件 -250-550毫米的工作距离 -显微镜/阴道镜适配器的兼容性 -用于兼容所有铰接臂CO₂激光器的激光器螺纹适配器 ...

... ACCU-Beam ® Universal Micromanipulator将铰接臂CO₂激光器连接到手术显微镜和阴道镜上。有多种支架可供选择,与连接设备相兼容,它可以为耳鼻喉科或妇科进行配置。 -用于可变光斑大小的缩放组件 -200-400毫米的工作距离 -可调节的操纵杆张力 -用于耳鼻喉科或妇科的配置 -显微镜/阴道镜适配器的兼容性 -兼容性的激光线适配器 ...

... 塞勒CO2激光微操作器用于铰接臂式CO2手术激光器和塞勒阴道镜。微机械手是一种主要用于妇科和耳鼻喉科的手术工具。 妇科:宫颈炎;原位癌;宫颈息肉;尖锐湿疣;阴道腺病;外阴病变;外阴、尿道口和宫颈的肿瘤;外阴、阴道和宫颈的尖锐湿疣;外阴阴道和宫颈的白斑症。 耳鼻喉科。喉部狭窄;喉部肉芽肿;喉结;喉部息肉;喉部、舌、口底和腭部的癌。 技术规格。 金属 - 2024和6061铝 镜片 - ZnSe(硒化锌)涂层 操纵杆 - 带张力控制的左右手操作 安装 - 可以围绕显微镜的光轴360°旋转 镜子 ...

... µM 微型机械手是 Sensapex 的最新产品。它有 3 个轴,也可根据要求提供第四个轴。与 SMX 微机械手一样,它的占地面积非常小,因此是洁净设置或在一个平台上设置多个机械手的最佳选择。所有 Sensapex 机械手都采用零漂移固态技术。由于机械手的运动质量小,它不会对安装在平台上的其他机械手产生振动。 即插即用的紧凑型系统,具有无限的可扩展性 集成闭环控制的零漂移固态驱动器 20 毫米量程,分辨率为 5 纳米,重复精度为 20 纳米 虚拟和物理第四轴选项 易于使用的电极交换机制 毫秒级同步,实现自动定位 负载 ...

... EasySpot混合型微操纵器是一种高精度的机电设备,它将CO₂激光器与手术显微镜或阴道镜连接起来,以使激光手术更加容易和准确。 ...

为了满足 IVF/ICSI 越来越高的应用要求,尼康和 Narishige 合作研发了高精度、结构紧凑的NTX系列显微操作器系统。NTX系列支持您自主配置最佳组合,以满足您的特定显微操作需求。 紧凑而稳定的设计。 缩短了从操作器接头到微电极尖端的距离,进而提高了稳定性。 悬挂式操作杆提供卓越的可操作性。 移动平稳,不会导致微电极漂移。 经改进,万向接头的安装方向便于安装和拆卸。 万向接头的角度计可确保精确的角度操作。 结合3D电机驱动粗调机械手和3D油细压微调机械手。 配备微电极返回机制,便于更换培养皿。 制造商:Narishige公司(显微操作器),东海公司(热台)

OmniProbe 350是三轴、端口安装式机械手,其特点是具有闭环反馈的压电马达,非常适合常规的TEM薄片制备。精确直观的控制意味着您可以快速、自信地工作,而不存在损坏或丢失样品的风险。 概述 基于第9代探针设计,OmniProbe 350提供精确的纳米级控制。其紧凑的端口安装设计,最大限度地减少与其他探测器和附件的干扰。凭借稳定的探针平台和亚纳米压电马达,这一代的探针具有低振动、低漂移和卓越的定位精度。再结合直观的用户界面,其运动方向是基于所见的图像进行校准的。 其结果是为常规样品提取(lift-out)提供了一流的性能。结合可变倾角栅网样品台,OmniProbe ...

... 全球公认的 PatchStar 微型机械手是电生理记录的完美选择。稳定的设计和超静音电子装置意味着您可以进行长期的膜片钳实验,甚至记录最小的信号。PatchStar 体积小巧,用途广泛,可以在体外或体内以任何角度围绕任何样品进行配置。智能设计和自动控制使您能够快速、轻松、可靠地更换和定位电极。 产品优势 进行灵敏记录 PatchStar 噪音低,即使是最安静的信号也能检测到。因此,您可以轻松地进行敏感录音,如单通道录音。 对小型结构进行长期记录 PatchStar ...
Scientifica
... TrakJector™ 微型机械手由德国制造,在平滑精细控制、精度(公差小于 1 微米)、速度、机械稳定性、低维护操作和易清洁方面都达到了新的标准。TrakJector™ 适用于徕卡、奥林巴斯、尼康和蔡司的所有普通倒置显微镜。 规格 电动轴范围:24 毫米 分辨率单向 > 100 纳米 重复精度< 1 微米 速度:最高 16 毫米/秒,30 级可调 机械手重量:10.5 磅(4.8 千克) 电源:110/240 VAC TrakJector™ 有两种喷射器型号: 电动 我们的 ...

微侵入式或非侵入式测量 氧和pH值在线监测 部分应用可提供二氧化碳监测 光学测量用OEM部件 氧、pH值或二氧化碳分布成像 高度并行测量 应用 APPLICATIONS 组织工程与再生医学领域的氧监测 3D工程化组织领域的一个主要问题是氧气和养分梯度向工程化组织中间的展开。使用PreSens微型传感器可在组织内进行高分辨率测定。我们的显微操作器系统确保测定端头在样本内精确定位。通过将光学传感膜集成至组织培养容器底部,可记录2D分析物图,并在长时间内追踪梯度展开。 微流体中的梯度和氧气消耗 由于需要的资源最少,微流体越来越多地应用于研究 ...
PreSens Precision Sensing GmbH

... 新的MP-845微型机械手的结构是基于TRIO-245的导螺杆设计,但增加了精密的交叉滚子轴承,以达到更严格的公差。25针连接器保证了未来与我们其他控制器的兼容性。MP-845有铝或不锈钢两种材质(见上面的不锈钢MP-845标签),是一个高度稳定的3轴机械手,每个轴上有25毫米的行程。TRIO MPC-100控制器为MP-845提供了一个合成的第四轴,可以在软件中设置为0到90度之间的任何角度,用于对角线运动。基于导螺杆设计,MP-845的整体尺寸和占地面积比大多数机械手要小,是在一次设置中需要2个移液器的应用或空间有限的设置的理想选择。 集成的旋转光学编码器(ROE)控制器设计紧凑,只需最小的工作台空间;提供安静、无风扇的操作;并且易于使用。不需要机架安装的控制器。位置坐标的相对值或绝对值直接显示在ROE上。TRIO ...
Sutter Instrument

... EzPatch 200A 微机械手是贴片夹持的理想选择,但其用户友好的控制方法和高分辨率的机械设计使其适用于诸如细胞内录音和显微注射等多种应用。 机械手采用高精度步进电机,具有微步进,机械手可达到高分辨率。 每个操纵器都通过干涉仪进行测试和微调,以确保质量。 当机械手不移动时,没有电流通过电机;由于引线螺杆的高摩擦力,该台被固定在原位。 操纵器在录制过程中不会增加任何电噪声,并且漂移非常低。 前台的角度可以在 15 度到 45 度之间精确调整,步长 5 度。 ...
NeoBiosystems, Inc.

... 这些超稳定的压电微机械手占地面积极小,因此可以将其放置在靠近样品或狭小的空间中。 世界上最小的压电微机械手 在所有轴上行驶 20 mm 超稳定、超精确的电极定位 电池供电,用于低噪声记录应用的 穿透模式为电池插入提供高加速步骤 细节 紧凑型压电来自 Sensapex 的微机械手提供了充足的运动范围和一个全功能的控制器。 精确定位,加上固有的无漂移操作以及将机械手放置在现场附近的能力,提供出色的稳定性。 此外,小占地面积允许将多个微机械手配置置置于狭小的空间中。 ...
Warner Instruments

... LN装置由三个迷你轴组成,使用适配器固定,形成一个完整的装置。该装置的设计结合了灵活性、稳定性、高分辨率和无漂移的体验。X轴的贴片角度可以连续调整。所有的机械部件都配备了接地点。该装置可使用转弯适配器、背折适配器或快速交换系统。这种精确而可靠的机械手发明于1993年,由于我们的服务政策,第一代系统仍然在世界各地的实验室中使用。在光学系统周围最多可以安装8个机械手。 规格: XYZ中的行程:25毫米 电机分辨率:4,8纳米 重现性: 小于1微米 重量(完整单元):2,2公斤 斯宾德尔引线:0,5 ...
Luigs & Neumann


... 微机械仪 激光显微手术功能: 激光可根据积层图形自动扫描(气化、燃烧、切割);五种图形操作界面:矩形、圆或环、曲线、点、圆或椭圆形;图形调整功能:二维调整或 同步调整; 图形旋转功能: 0-360° 可调. 适应症状: 喉咙手术:肿瘤,息肉,声带结节,口腔疾病,扁桃 体,打鼾耳朵手术:鼓膜穿孔,切割,葡萄球菌毛孔,切除,外耳道肿瘤等 鼻子:下甲状腺肥大,鼻息肉,鼻窦肿瘤, 鼻血管瘤,鼻腔闭位。 智能激光微机械手性能: 聚焦距离:200mm-450mm; 工作范围:显微镜中心现场可调半径 ...
... 详细信息 单手操作简单,符合人体工程学的设计在同一平面上具有 x、y 和 z 控件。 这款手动微机械手具有高度稳定的运动,其高精度稳定的交叉滚子轴承具有良好的使用寿命,让您在未来几年内保持一致的放置精度。 我们的稳定夹紧系统易于定位和安装在我们的减压防振板上,可根据您的要求安装在简单的被动橡胶支架或主动防振支架上。 由于所有控制旋钮都安装在后方(而不是侧面),因此可以相互设置一些用户友好的 MM 33 操纵器。 为了避免在使用重量负载(漂移)时 Z ...
Campden Instruments

... 用户友好的TransferMan 4r拥有符合人体工程学的创新设计,可以满足最苛刻的微操作要求。智能功能,如改进的自动原点功能和位置存储,使得即使是最复杂的微操作技术也能简单而快速地执行。DualSpeed™操纵杆可以在所有三个维度上进行精确和直观的移动,并可进行动态移动以覆盖更远的距离。它是操纵卵母细胞和早期胚胎、转移干细胞和微粒子以及非人类生殖生物学领域广泛应用的理想选择。特定应用的用户配置文件简化了个人工作流程,有四个预定义的应用面具可供选择(例如,用于细胞转移、DNA注射等)。可自由编程的 ...
Eppendorf SE/艾本德

... 您是否面临着每天越来越多的ICSI-周期,而珍贵的卵母细胞的受精/囊胚率却同样高?您是否曾经历过与工作有关的压力,或由于不符合人体工程学的(设置)微型机械手而导致手臂、颈部或背部的疼痛? TransferMan® 4m的设计是为了解决现代试管婴儿实验室的主要挑战,以提高受精/囊胚率、可重复性、产量,并尽量减少用户的工作压力。申请一个个人现场演示,将TransferMan® 4m的简单、符合人体工程学的操作和出色的性能与您目前的解决方案进行比较 - 说服您自己。 特点 独特的双速操纵杆,用于精确和快速的运动 采用PhysioCare®概念设计,提高了人体工程学,减少了痛苦 Y-off功能可在X方向进行精确和较少创伤的注射运动 前所未有的直接传输运动,没有任何可识别的延迟 可编程的Z轴限制,防止毛细血管破裂 储存在介质液滴内和上方的工作位置,提高工作流程速度 可适用于所有常规显微镜 应用范围 卵母细胞或早期发育阶段的胚胎的显微操作(如ICSI、孵化等 与PGT相关的活组织检查(如滋养层活组织检查 ...
Eppendorf SE/艾本德

... InjectMan 4是对粘附细胞、较小的生物体和发育早期阶段的胚胎进行显微注射的理想选择。与FemtoJet 4i或4x结合使用,它能实现快速的半自动注射。此外,InjectMan 4是所有需要动态运动模式和通过操纵杆按钮直接控制注射过程的复杂应用的理想微机械手。轴向注射运动(X/Z方向)有助于在注射时尽量减少对粘附细胞的机械应力。高穿透速度使注射到刚性结构中比以往更容易。新的用户界面有四个预定义的应用掩码,有利于个人工作流程的开展(例如,用于粘附细胞注射、对鱼类幼虫的连续显微注射等)。可自由编程的 ...
Eppendorf SE/艾本德
请说明:
您的建议是我们进步的动力:
剩余字数